工業(yè)機器人是智能制造行業(yè)中的重要技術(shù)裝備,其中齒輪箱作為工業(yè)機器人的重要組成部分,其能否正常運行直接影響工業(yè)機器人的健康狀態(tài),工業(yè)機器人齒輪箱的故障診斷對于工業(yè)機器人的狀態(tài)運維至關(guān)重要。
近年來,國內(nèi)外學(xué)者對齒輪箱的狀況監(jiān)測和故障診斷主要基于 3 種理念:模擬齒輪箱不同負載下的故障建模;采用時域、頻域、時頻域等方法進行信號處理;數(shù)據(jù)驅(qū)動的智能診斷方法。前 2 種理念比較依賴先驗知識,應(yīng)用對象相對簡單,難以分析海量數(shù)據(jù)中抽象的特征,因此,基于數(shù)據(jù)驅(qū)動的智能診斷方法成為故障診斷的重要工具。楊宇等采用雙樹復(fù)小波包提取重構(gòu)信號中的故障能量特征作為支持向量機診斷模型的輸入,有效提高降噪效果;Xiao 等訓(xùn)練出由 12 個粒子群算法優(yōu)化的 BP 神經(jīng)網(wǎng)絡(luò)提高了齒輪箱故障診斷識別率;Shi 等提出了一種改進的 K 最近鄰算法的方法來界定合適的 k 值進行齒輪箱故障診斷。鑒于淺層機器學(xué)習(xí)診斷方法具有難以對信號進行深層次的特征提取和繁瑣的參數(shù)尋優(yōu)的局限性,深度學(xué)習(xí)成為了故障診斷領(lǐng)域的研究熱點。Guo 等提出一種基于改進深度卷積神經(jīng)網(wǎng)絡(luò), 能有效對軸承故障模式和故障程度進行識別、評估;李濱等采用 Dropout 優(yōu)化后的深度信念網(wǎng)絡(luò)實現(xiàn)對磨損程度的精準(zhǔn)預(yù)測;Shao 等提出用降噪自動編碼器和壓縮自動編碼器構(gòu)造了一種新的深度自動編碼器,增強特征學(xué)習(xí)能力;曹正志等提出利用改進的 1D-CNN-LSTM 模型并引入遷移學(xué)習(xí)模型,能夠以較快的速度對滾動軸承 6 種不同工作狀態(tài)進行分類識別。
其中,在以工業(yè)機器人齒輪箱為故障診斷對象的研究方法中,Chen 等設(shè)計了一種新型的具有頻譜計算和故障診斷功能的卷積神經(jīng)網(wǎng)絡(luò)應(yīng)用于重型工業(yè)機器人系統(tǒng);Kim等提出基于相位的時域平均方法對工業(yè)機器人中的齒輪箱進行故障檢測;趙威等提出基于邊 - 云協(xié)同和深度學(xué)習(xí)的工業(yè)機器人齒輪箱等核心部件健康評估方法。然而,在面對結(jié)構(gòu)復(fù)雜、運行條件多變、故障機制不明確等大型工業(yè)旋轉(zhuǎn)機械系統(tǒng)時,所構(gòu)建的診斷模型仍存在挑戰(zhàn)。
工業(yè)機器人是集機械、傳感器、計算機、控制器、人工智能等多學(xué)科技術(shù)于一體的典型復(fù)雜工業(yè)設(shè)備,所處的運行環(huán)境也隨著社會生產(chǎn)生活的應(yīng)用場景的多樣性,對信號采集具有更高的要求。然而復(fù)雜的工業(yè)機器人結(jié)構(gòu)和極端工況導(dǎo)致齒輪箱的故障特征易受到噪聲干擾,同時,機械設(shè)備運行過程中收集到的信號存在無標(biāo)簽的樣本,而 DBM 可以從大量未標(biāo)記的數(shù)據(jù)中學(xué)習(xí)深層特征,在 DBM 的逼近和求導(dǎo)過程中,除了自下而上的傳播外,還包括自上而下的反饋, 使 DBM 能夠更好地傳播輸入數(shù)據(jù)的特征。因此,本文中將 DBM 應(yīng)用于不同工況下工業(yè)機器人齒輪箱的故障診斷。
本文中基于 BRTIRUS1510A 工業(yè)機器人實驗平臺,在不同工況下分別收集了 6 種故障模式的信號,分別測試了單一工況和復(fù)雜工況的故障診斷效果。同時,與其他經(jīng)典故障診斷模型:人工神經(jīng)網(wǎng)絡(luò)( artificial neural network,ANN)、深度置信網(wǎng)絡(luò)(deep belief network,DBN)、棧式自編碼器( stacked autoencoder,SAE)、K 最近鄰( k-nearest neighbor,KNN)、支持向量機(support vector machine,SVM)進行比較,進一步驗證 DBM 模型的故障診斷性能。
一、相關(guān)理論基礎(chǔ)
振動信號的統(tǒng)計特征提取
小波包變換可以有效提高信號中的統(tǒng)計參數(shù)的性能,從而反映機械設(shè)備在一段時間內(nèi)的健康狀況。因此,本文中采用 WPT 對故障產(chǎn)生時的振動信號 x 進行預(yù)處理,將每個樣本包含的振動信號進行小波分解,從而得到每個節(jié)點的小波包能量 X(i),再對其進行統(tǒng)計特征的提取,N 為節(jié)點能量的長度,具體統(tǒng)計參數(shù)信息如表 1 所示。

DBM 模型定義
DBM 是由多個受限玻爾茲曼機( restricted boltzmann ma-chine,RBM)串聯(lián)堆疊而形成的一個深層神經(jīng)網(wǎng)絡(luò),如圖 1 所 示,DBM 由 d 個 RBM 組成,其中,RBM1 由可視層 v 和隱藏層 h 1 組成,可視層用于數(shù)據(jù)輸入,隱藏層用于提取數(shù)據(jù)特征,層間節(jié)點對稱連接,同層節(jié)點間無連接,同時,RBM1 的隱藏層 h 1 又作為后面的 RBM2 的可視層,以此類推組成由多個 RBM 堆疊而成的 DBM 網(wǎng)絡(luò)。與深度信念網(wǎng)絡(luò)相區(qū)別的是, DBM 的任意兩層之間都是雙向連接的,代表了特征信號可以雙向傳遞。
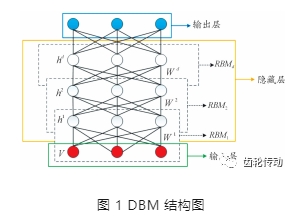
RBM 的訓(xùn)練過程實際上是求出一個最能產(chǎn)生訓(xùn)練樣本的概率分布。求出的分布函數(shù)需要滿足這個分布下產(chǎn)生訓(xùn)練樣本的概率最大,由于這個分布的決定性因素在于權(quán)值系數(shù)(W 1 ,W 2 ,…,W d ),因此訓(xùn)練 RBM 的過程就是運用對比散度算法尋找最佳的權(quán)值的過程。
DBM 是基于能量的模型,模型變量的聯(lián)合概率分布由能量函數(shù)參數(shù)化。其中 v 和 h 分別表示可見層和隱藏層的神經(jīng)元集合,代 θ = {W,b,c}表模型待定參數(shù),b 和 c 分別為可見層和隱藏層神經(jīng)元的偏置,(v,h) 的聯(lián)合概率由下式給出:

在給定可視層 v 時,可通過聯(lián)合概率分布推導(dǎo)出隱藏層第 j 個節(jié)點開啟(激活狀態(tài)設(shè)置為 1)或關(guān)閉(抑制狀態(tài)設(shè)置為 0)的概率。同理,在給定隱層 h 時,也容易推導(dǎo)出可視層第 i 個節(jié)點為 1 或者 0 的概率:

假定給模型輸入 G 個樣本,通過最大化重現(xiàn)輸入,即最大化帶權(quán)值懲罰的對數(shù)似然目標(biāo)函數(shù)來求模型參數(shù)。使用上式中的隱藏層和可見層的概率來建立概率目標(biāo)函數(shù)L(θ), 并通過最大化當(dāng)前觀測樣本的概率來選擇一組模型參數(shù) θ∗ :
模型訓(xùn)練通過對比散度算法 (contrastive divergence, CD) 進行。首先,可見單元的狀態(tài)被設(shè)置成一個訓(xùn)練樣本,計算隱藏層單元的二值狀態(tài),在所有隱藏單元狀態(tài)確定了之后,再來確定每個可見單元取值為 1 的概率,進而得到可見層的一個重構(gòu)。具體步驟為:取初始值,其中 t = 1,2…, k,利用 P(h| v (t - 1) )采樣出 h (t - 1) ,再利用 P(v | h (t - 1) )采樣出 v (t) ,接著對每個參數(shù)求偏導(dǎo):
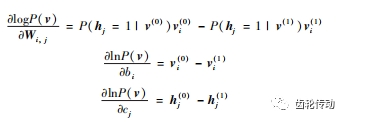
根據(jù)以下規(guī)則更新權(quán)重:
基于 DBM 的故障診斷系統(tǒng)
基于 DBM 的工業(yè)機器人齒輪箱故障診斷系統(tǒng)如圖 2 所示。具體流程如下:
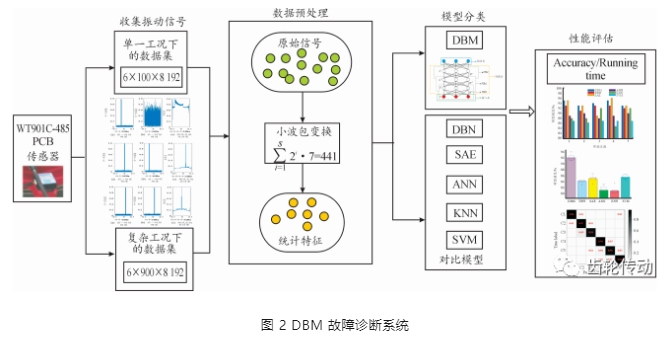
1) 分別在單一和復(fù)雜的工況下收集原始數(shù)據(jù)集 x。
2) 原始振動信號 x 通過小波包變換進行處理,獲得統(tǒng)計特征矩陣 X(i)。
3) 使用統(tǒng)計特征矩陣及其相應(yīng)的故障類別標(biāo)簽來訓(xùn)練 DBM,并與其他故障分類模型對比。
4) 調(diào)整模型參數(shù)后,獲得每個模型的精度和運行時間, 評估 DBM 的應(yīng)用性能。
二、實驗測試
基于單一工況的實驗
搭建的實驗平臺基于負載可達10 kg、擁有1 500 mm 臂展的 BRTIRUS1510A 六自由度工業(yè)機器人。其中,一軸、二軸和三軸被稱其為機器人的手臂,四軸、五軸和六軸被稱其為它的手腕。機械臂的運動是將交流伺服電機作為其動力源,機械臂與機械臂之間通過 RV 減速器連接,最終可以保證機械臂精確、可靠的運行。
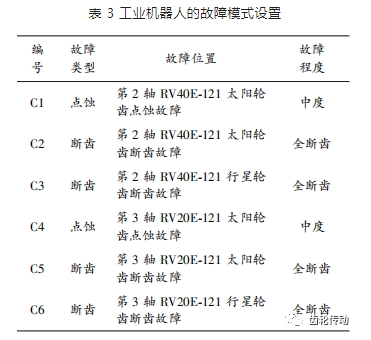
表 2 是工業(yè)機器人在運行期間的工況信息設(shè)置。實驗平臺如圖 3 所示,實驗在第二軸和第三軸減速器上模擬了不同故障,詳見表 3。

由于工業(yè)機器人的每個部分都是剛性連接的,其運行過程中的振動信號可以傳輸?shù)矫總€位置,所以將采集振動信號的加速度傳感器分別放置于第 2 軸和 3 軸的故障位置處,可采集到大量有價值的數(shù)據(jù)。加速度傳感器通過網(wǎng)線與筆記本相連接之后,可以從筆記本里面的上位機軟件(即采集系統(tǒng))對傳感器內(nèi)置的參數(shù)進行設(shè)置、實時數(shù)據(jù)進行查看以及采集數(shù)據(jù)的保存,從而監(jiān)測齒輪的健康狀況。加速度傳感器的采樣頻率為 100 kHz,采樣時間為 20 s,測量精度為 1% ,所產(chǎn)生的器件噪聲可能對振動信號的采集有較大干擾。
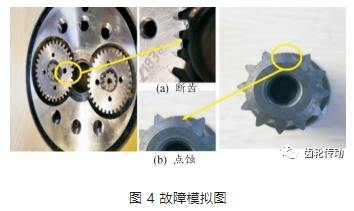
常見的齒輪箱傳動失效形式有斷齒和點蝕,如圖 4 所示,圖 4(a)是將行星輪通過銑削加工的方式來模擬出斷齒故障;圖 4(b)是將太陽輪通過激光點焊的加工方式來模擬出點蝕故障。
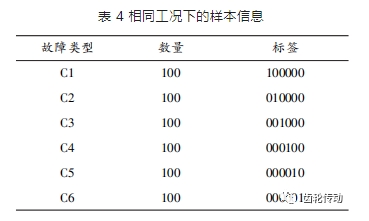
在本次實驗中,將每個輪齒的單一故障定義為一種故障模式,如表 3 所示,本次實驗總共設(shè)置了 6 種故障模式,分別標(biāo)記為 C1、C2、C3、C4、C5 和 C6。本表還詳細介紹了本次實驗所模擬的齒輪故障類型、故障位置以及故障程度等相關(guān)信息。
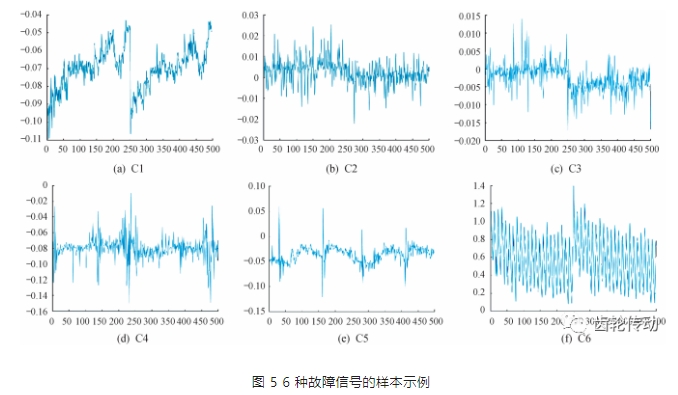
實驗 2. 1 選擇工業(yè)機器人在低速(600 r/ min) 和空載 (0 kg)下運行的振動信號作為診斷單一工況下齒輪箱的故障類別的樣本。圖 5 顯示了加速傳感器在上述單一工況下收集的 6 種故障的原始信號示例,由于不同信號之間振動的間隔時間具有不同的連續(xù)性,所以 C1 和 C5 的原始振動信號圖明顯不同。
首先在單一工況下采集工業(yè)機器人的 6 種故障模式對應(yīng)的振動信號,每種故障模式采集 819 200 個數(shù)據(jù)點,設(shè)置樣本長度為 8 192,構(gòu)建 6 × 100 × 8192 的樣本特征矩陣;然后, 對每個樣本進行 5 層小波包變換,并在每層的計算中獲得表 1所示的 7 個統(tǒng)計參數(shù),因此,經(jīng)過小波包變換后的樣本維度為,最終得到特征矩陣大小為 600 × 441。如表 4 所示,每 100 個樣本對應(yīng)一種故障類型。
隨機選擇數(shù)據(jù)集的 500 個樣本用于 DBM 模型和其他深度模型的訓(xùn)練,其余 100 個樣本用于測試。
基于復(fù)雜工況的實驗
實驗 2. 2 進一步評估了所提出的 DBM 模型在復(fù)雜工況下的性能表現(xiàn)。對于每類故障樣本,復(fù)雜工況下的實驗選擇工業(yè)機器人在 3 種運行速度(600、1 500、2 400 r/ min)和 3 種載荷(0、4. 8、9. 6 kg)共 9 種工況下運行的振動信號進行混合,從而得到同一故障類別下,包含所有工況的故障信號,作為診斷復(fù)雜工況下齒輪箱故障的樣本。
實驗數(shù)據(jù)收集參數(shù)設(shè)置與上述第 2. 1 節(jié)相同,在 6 種故障類型和 9 個工況下,分別選擇 819 200 個數(shù)據(jù)點,每個樣本長度設(shè)置為 8 192,原始特征矩陣為 5 400 × 8 192 的矩陣。經(jīng)過 5 層小波包變換后,特征矩陣的大小轉(zhuǎn)換為 5 400 × 441,即 5 400 個樣本,每個樣本長度為 441。其中,每 900 個樣本對應(yīng)一種故障,共 6 種故障樣本,然后根據(jù) 5∶ 1 的比例將樣本分為訓(xùn)練集和測試集。
對比實驗
本文中選擇了 5 種模型參與對比實驗:ANN 具有非線性自適應(yīng)信息處理能力,在模式識別中表現(xiàn)出良好的智能特性;DBN 是由多個受限玻爾茲曼機 RBM 堆疊的深度學(xué)習(xí)模型,它是一種代表性的無監(jiān)督學(xué)習(xí)方法,可用于特征學(xué)習(xí)或預(yù)訓(xùn)練網(wǎng)絡(luò),與 DBM 的差別在于前者使用逐層貪婪方法進行訓(xùn)練,時間較長,后者的特征信號一直往上傳,低層分布求解依賴于高層的分布;SAE 是由多層自編碼網(wǎng)絡(luò)堆疊 而成的深度網(wǎng)絡(luò),前一層自編碼器的輸出作為其后一層自編碼器的輸入,能更好地學(xué)習(xí)輸入數(shù)據(jù)的特征表示;KNN 主要是根據(jù)樣本空間中最近的 K 個樣本的數(shù)據(jù)類別確定預(yù)測樣本的數(shù)據(jù)類別。由于其算法復(fù)雜度低、簡單有效,被廣泛應(yīng)用于數(shù)據(jù)挖掘和機器學(xué)習(xí);SVM 使用核函數(shù)將原始數(shù)據(jù)映射到高維 Hibbert 空間,解決原始空間中的線性不可分離性問題,對非線性系統(tǒng)具有良好的學(xué)習(xí)能力和推廣能力。
三、實驗結(jié)果和分析
上述的所有實驗的訓(xùn)練和測試過程均使用 Matlab 2016b 編程,并在配置 Intel ® Core (TM) i5 - 4590 CPU @ 3. 3GHz 處理器和 16 GB RAM 的電腦上執(zhí)行。
基于單一工況的實驗結(jié)果
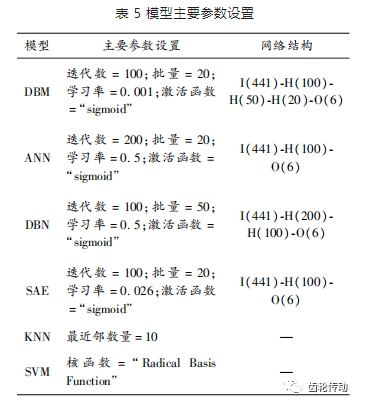
不同故障診斷模型的主要參數(shù)設(shè)置如表 5 所示,其中, I、H、O 分別表示網(wǎng)絡(luò)輸入層、隱藏層和輸出層。
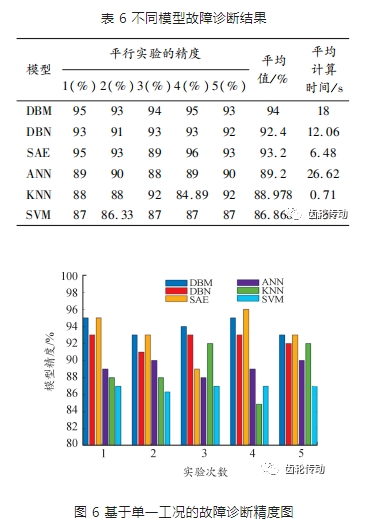
對于每個模型,在相同的參數(shù)下都進行了 5 次平行試驗。具體的實驗結(jié)果如圖 6 和表 6 所示,其中,基于 DBM 的故障診斷模型在對比實驗中達到了最高的平均識別精度;通過比較表 6 中 6 個模型的平均計算時間,可知在同一樣本數(shù)據(jù)集中,由于深度網(wǎng)絡(luò)結(jié)構(gòu)的復(fù)雜性高于淺層網(wǎng)絡(luò),深度神經(jīng)網(wǎng)絡(luò)的計算時間略高于其他分類模型,但準(zhǔn)確性普遍較高,而在深層網(wǎng)絡(luò)中,DBM 在工業(yè)機器人的故障診斷和分析中表現(xiàn)了更強的識別能力。
基于復(fù)雜工況的實驗結(jié)果
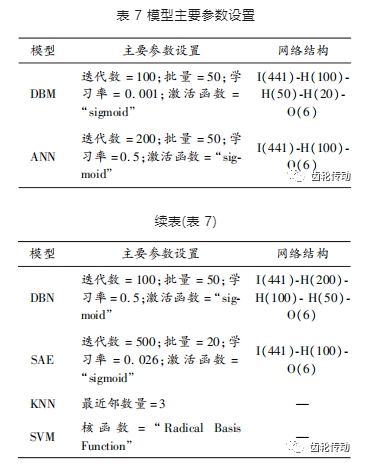
在復(fù)雜工況下進行實驗,得到不同故障診斷模型的主要參數(shù)設(shè)置如表 7 所示,其中,I、H、O 分別表示網(wǎng)絡(luò)輸入層、隱藏層和輸出層。
同理,對于每個模型,在相同參數(shù)下進行了 5 次試驗。圖 7 使用盒形圖可視化地總結(jié)每個模型精度的數(shù)值分布,可以看出,DBM 的方框處于其他 5 種模型的上方,且方框的長度較短,意味著模型的精度值分布較為集中,進一步說明了在復(fù)雜工況下,DBM 捕獲的特征信息更具有代表性。

由表 8 可知,在復(fù)雜工況下,基于 DBM 模型的故障診斷平均識別率仍然是對比實驗所得結(jié)果中的最高精度,最高為 94. 11% ;平均診斷精度排在第二的是 SAE,為 85. 13% ;隨后依次是 SVM、DBN、ANN、KNN。

圖 8 所示的混淆矩陣進一步分析了每個模型對每一類故障樣本的分類情況。混淆矩陣的每行對應(yīng)標(biāo)簽的真實值, 每列對應(yīng)模型的預(yù)測值,當(dāng)混淆矩陣對角線上的比值較高時,意味著該類樣本的分類效果較好。
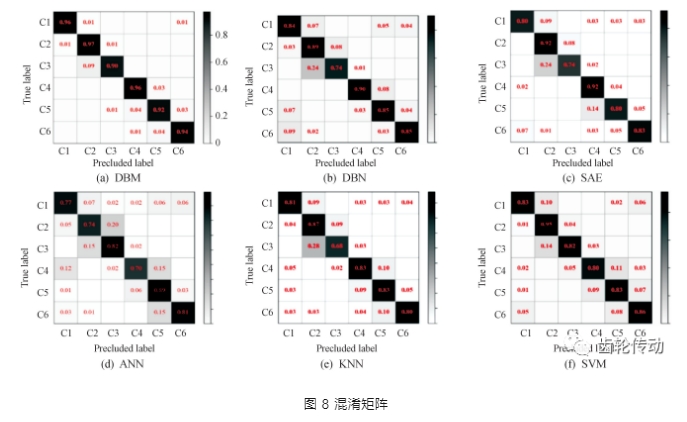
顯然,圖 8(a)所示的 DBM 對每一類故障的分類情況比其他模型更好。在 DBM 的混淆矩陣中,誤判率最高的情況為 C3 被錯誤地歸類為 C2,其誤判率為 9% ,這是由于 C2 和 C3 為模擬的同種故障類型,即斷齒,同時,由于 C5 和 C4 的故障位置都為第三軸太陽輪,所以也出現(xiàn)了誤判。
其他故障診斷模型出現(xiàn)的誤判也主要發(fā)生在相同故障類型之間、同一故障位置之間的故障類別。綜合來看,DBM 的混淆矩陣的誤判率在 6 個模型中較小,其故障診斷性能優(yōu)于其他模型。
實驗結(jié)果表明:具有深層網(wǎng)絡(luò)結(jié)構(gòu)的 DBM、SAE 和 DBN 通過隱藏層的學(xué)習(xí)和高效的參數(shù)優(yōu)化算法提取到了數(shù)據(jù)中抽象而全面的特征信息,均表現(xiàn)出了較好的診斷性能,而 SVM 比 DBN 略好 1. 31% 的平均識別率,說明基于高斯徑向基函數(shù)的分類器在復(fù)雜工況的實驗中也能表現(xiàn)較好的分類能力。在處理同一樣本數(shù)據(jù)集的過程中,由于深度網(wǎng)絡(luò)結(jié)構(gòu)的復(fù)雜性高于淺層網(wǎng)絡(luò),所以深度神經(jīng)網(wǎng)絡(luò)的計算時間略高于其他分類模型,但深度網(wǎng)絡(luò)的分類準(zhǔn)確性普遍較高。綜合來看,基于 DBM 的模型能夠更全面地學(xué)習(xí)信號表示,在故障診斷實驗中表現(xiàn)出較好的魯棒性。
四、結(jié)論
本文中將基于 DBM 的故障診斷系統(tǒng)應(yīng)用于結(jié)構(gòu)復(fù)雜、高度精密的六自由度工業(yè)機器人,實驗證明 DBM 能獲取故障信號中更復(fù)雜、抽象的潛在表示,提升故障分類的識別準(zhǔn)確率。同時,通過在單一工況和復(fù)雜工況下與其他故障分類模型進行對比分析,結(jié)果表明基于 DBM 的故障診斷模型具有最好的模式識別性能,可以有效地應(yīng)用于工業(yè)機器人齒輪箱的多工況多故障分類問題。
參考文獻略.